Detail branch
浅い特徴を残し、細線・端点・局所的な変化を失いにくくする。
LiteRaceSegNet-V13 は、custom LiteIR-style lightweight CNN backbone と boundary-guided segmentation decoder を軸に、小さな損傷領域と不規則境界を説明します。比較表では SegFormer-B3 baseline も扱い、このページでは LiteRaceSegNet 本体の構造を中心に読みます。
LiteRaceSegNet は MobileNetV2/V3-style lightweight block / inverted residual の設計アイデアから着想を得た custom LiteIR-style lightweight CNN segmentation model です。比較 baseline は別経路に置き、ここでは LiteRaceSegNet の設計を中心に読みます。
seg/core/lightweight_race.py の LiteIRBlock は、軽量 inverted-residual の考え方を道路損傷 segmentation 向けに組み直した custom block です。detail/context branch と boundary-guided fusion につながる main path として読めます。
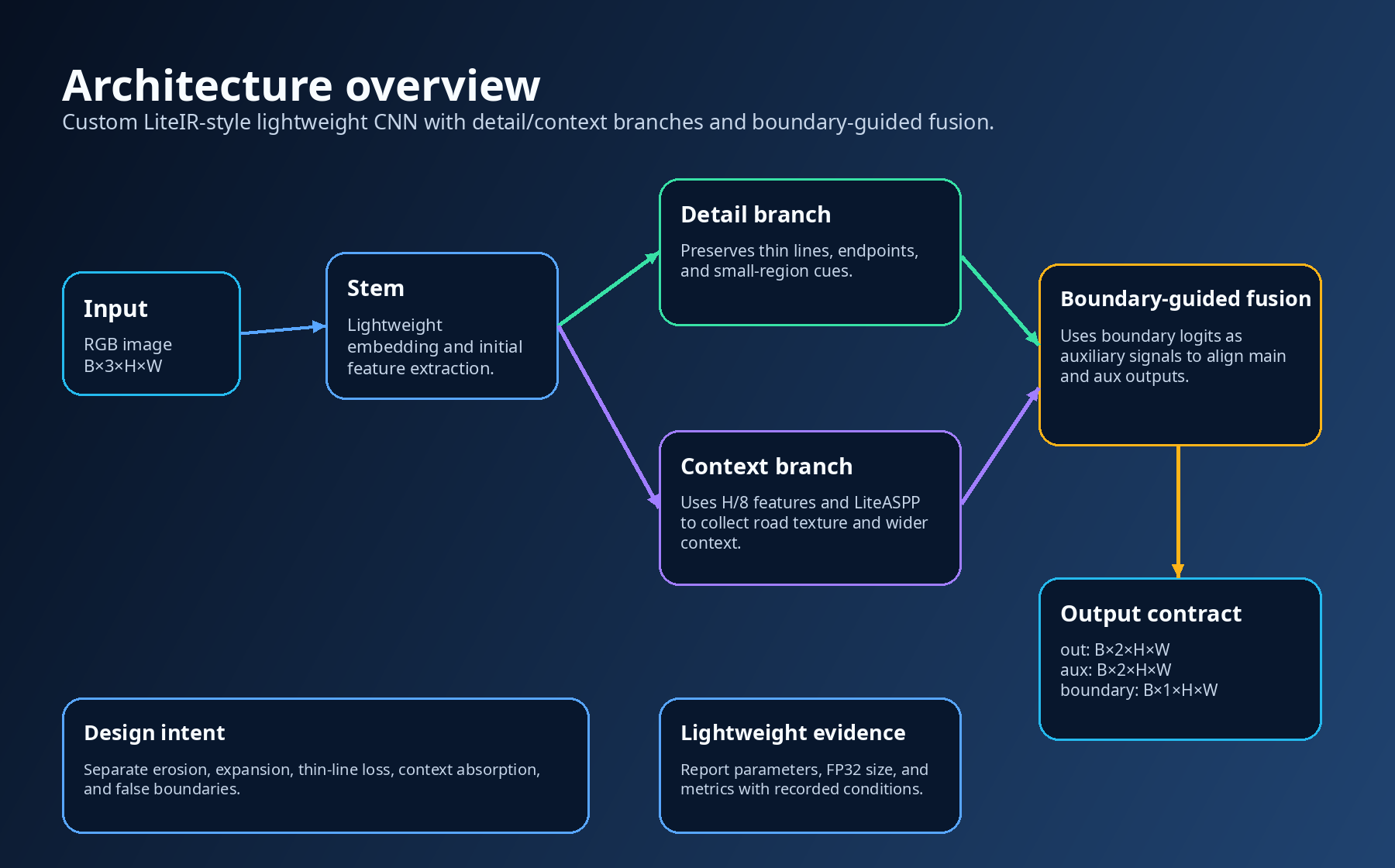
公開用の再構成図。入力から detail/context、LiteASPP、boundary-guided fusion、出力までを一つの流れで確認する。
道路損傷は画素数が小さく、低コントラストで、背景路面と混ざりやすい。mIoU の平均値だけでは、細い亀裂が消えたのか、境界が膨張したのか、背景へ吸収されたのかが説明しにくい。
そのため本ポータルでは、主出力 out、補助出力 aux、境界補助 boundary を分け、実装確認と説明を接続します。
各部品は単独の飾りではなく、境界を説明可能にするための役割を持ちます。
浅い特徴を残し、細線・端点・局所的な変化を失いにくくする。
周辺路面や損傷の連続性を読み、局所ノイズだけで判定しない。
軽量な受容野拡張で、広い文脈を過剰なパラメータ増加なしに取り込む。
境界補助信号を使い、主セグメンテーションの形状説明を支える。
モデル説明と実装確認をつなぐ最低限の契約です。公開ページでは、実測値と未測定値を混ぜず、この契約を基準に説明します。
| Output | Shape | 確認する意味 | レビュー時の見方 |
|---|---|---|---|
| out | B × 2 × H × W | 主セグメンテーション logits | 損傷領域の最終予測を読む。 |
| aux | B × 2 × H × W | 補助セグメンテーション出力 | 中間 supervision と安定性の補助として扱う。 |
| boundary | B × 1 × H × W | 境界補助 logit | 境界の残り方、膨張、細線消失の説明に使う。 |
成功例だけでなく、侵食、膨張、細線消失、文脈吸収、誤境界を分けることで、モデルがどこで弱いかを説明できます。これは改善方針や ablation の理由にもなります。
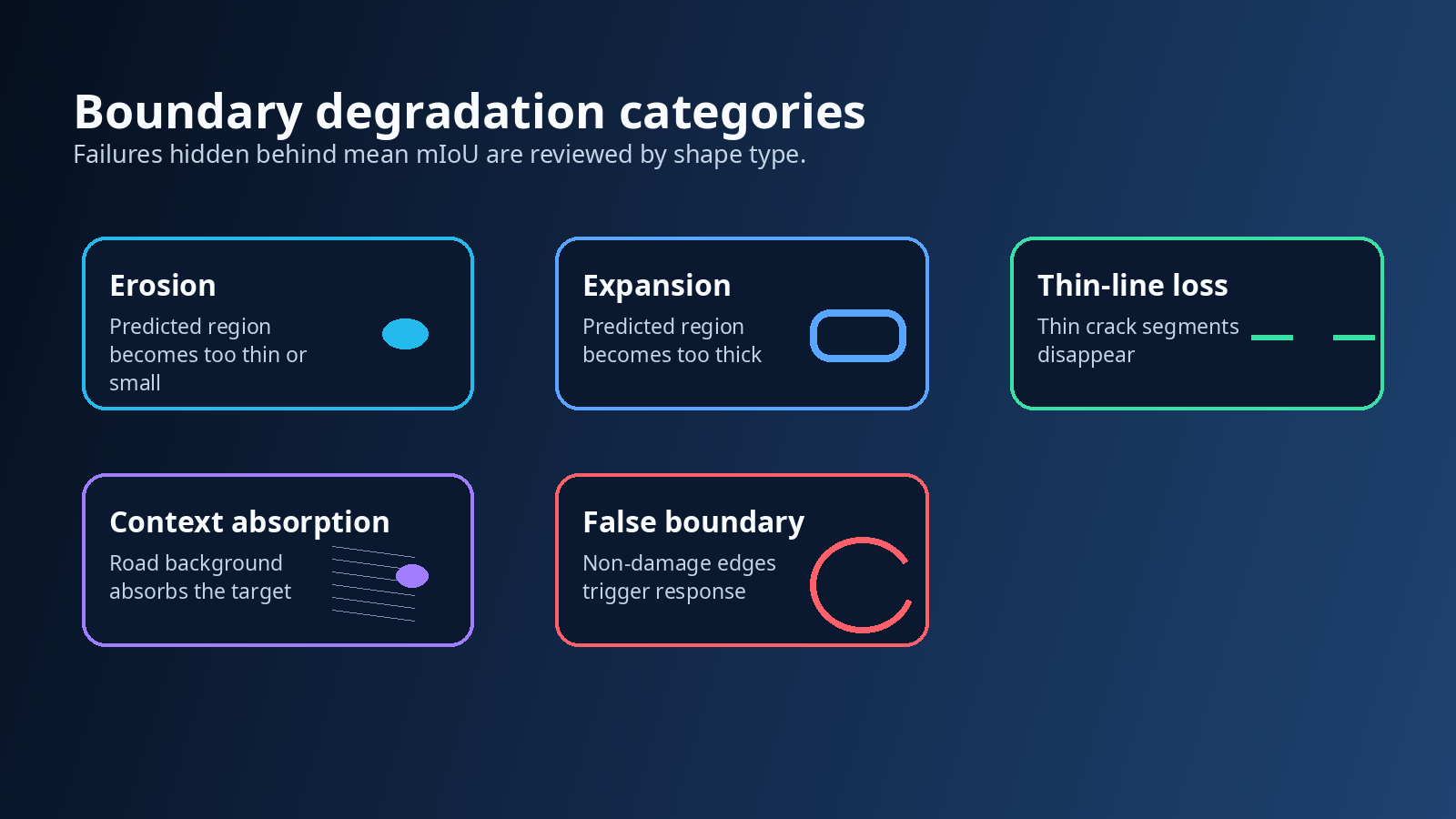
失敗条件を隠さず、研究テーマの説明材料として残す。